
ID : 5245
Simulating a Program Operation with Teach Pendant
This method enables to simulate the robot motion of created programs by using teach pendant, without moving actual robot.
1
Turn ON the Enable Auto..
Set the mode selector switch to the AUTO position.
To set the robot in machine lock, check that the LED of [MOTOR] is on, and then press [LOCK].
The LED of [LOCK] is ON when the robot is machine-locked.
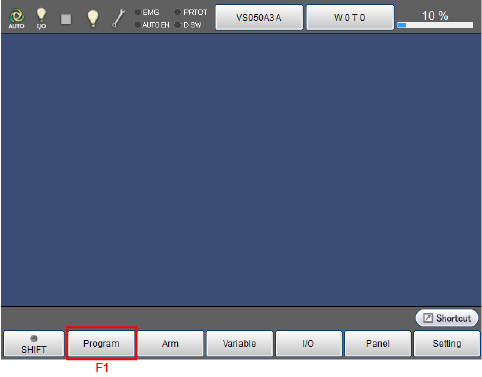
2
Press [F1 Program].
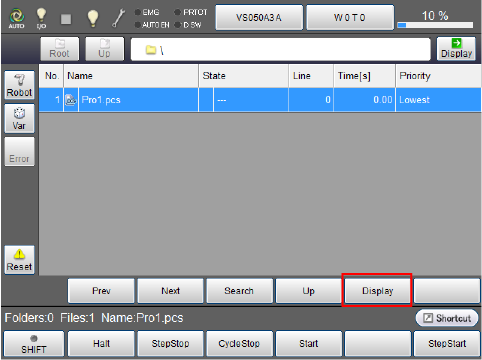
3
Select [Pro1.pcs] in the Program List window and then press [Display].
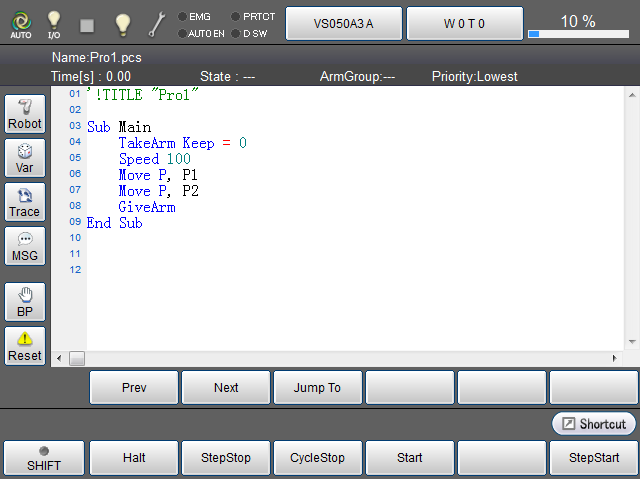
4
[Pro1.pcs] is displayed.
5
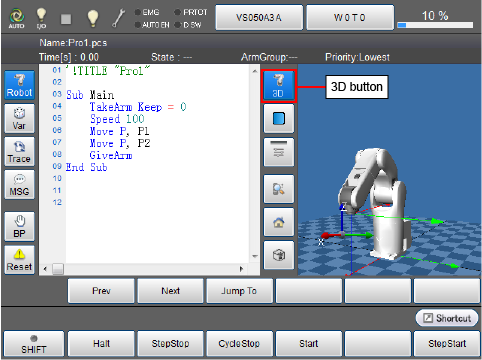
Press [Robot] button on the left side of the screen to display a robot.
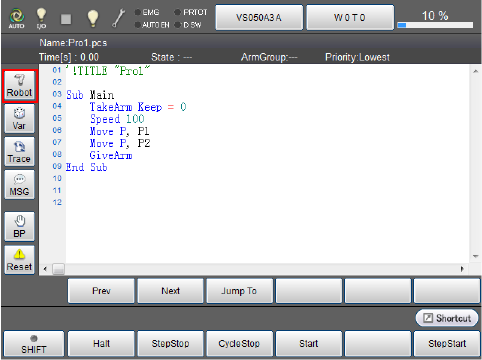
If the robot image does not appear, press [3D] button.
6
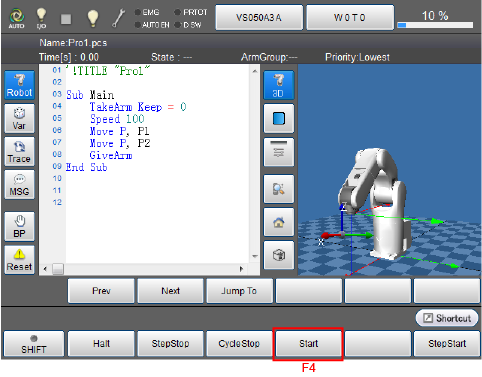
Select [Start] button.
7
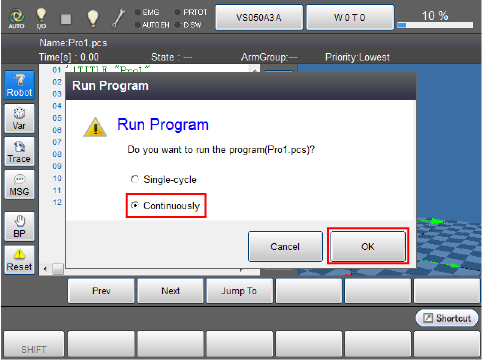
The system message will be desplayed.
Select [Continuously] by using cursor key or jog dial, or directly touching the screen, and then press [OK].
8
The robot image on the right side of the screen moves along with the program displayed on the left of the screen.
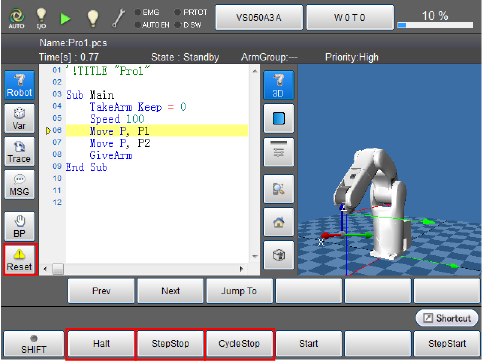
There are three ways to stop the robot motion.
To reset the program which is under execution, press [RESET] button.
- Halt :
Executing the halt immediately interrupts the running task program selected or all running task programs midway the moment [F1 Halt] or [STOP] button is pressed, respectively. - Step Stop :
Executing the step stop interrupts the running task program midway after executing the step in which the step stop key is pressed. - Cycle Stop :
Executing the cycle stop stops the robot after executing the last step of the task program. This is used when the robot is continuously started.
ID : 5245