
ID : 2161
Procedures for Adjusting Force Sensor Compliance Control
The following shows the adjustment procedure for operations with force control.
- Set the Control force and Control rate first.
- Gradually decrease the value of virtual damper (Damper).
- Normally, you do not need to change the values of the virtual inertia (Mass) and virtual spring (Spring).
- You can use a teach pendant and commands for parameter setting though, it is recommended not to use both of them at the same time. Doing so may lead to wrong settings due to confusion.
- If a direction you intend to control and a direction specified by a robot motion command (such as Move command) as a robot motion direction are the same, the force control cannot be performed as you have specified by the control force, control rate and virtual damper. In this case, move a robot to the position where the control starts, and then skip the robot motion command with MotionSkip command.
(1) Control Force and Control Rate Settings
Set the control force and control rate with a teach pendant or command.
| Parameter | Setting value |
|---|---|
| Control force | Set a target force or moment. |
| Control rate | For the target direction, set 100%. For other directions, set 0%. |
When you set parameters with a Teach pendant
Refer to "Parameter Setting" for about operation method.
When you set parameters with a command
Use ForceParam command.
Example: Apply 30 N pressure on the positive Z direction of Tool coordinate system on the table number 1.
ForceParam 1, 1, P(0,0,30,0,0,0), Rate=P(0,0,100,0,0,0)(2) Adjust the Virtual Damper (Damper) by Gradually Decreasing the Value
With operating an actual robot, set the virtual damper by monitoring amplitude and convergence on the graph of the force control log.
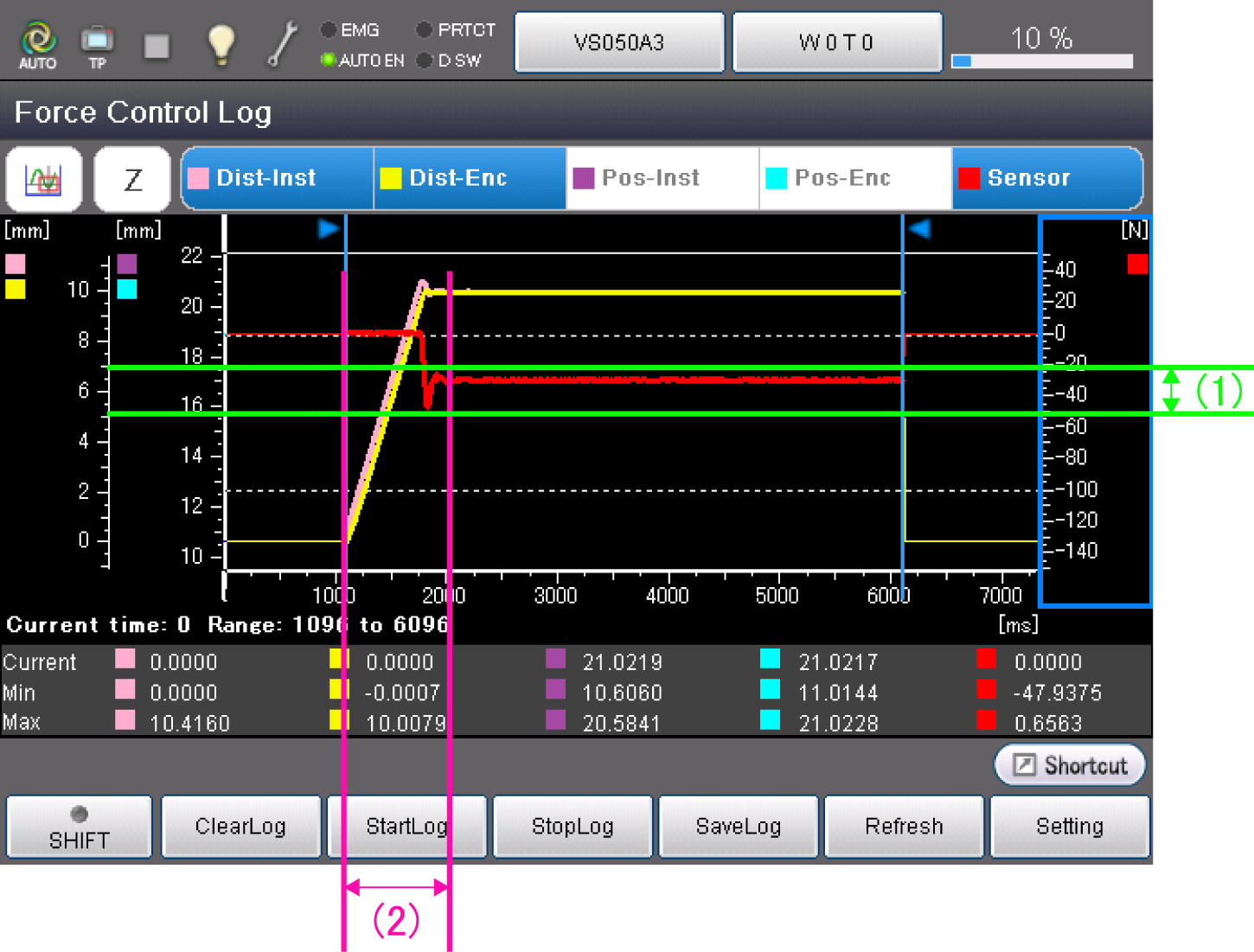
| Number | Check points |
|---|---|
| (1) | The amplitude converges within the positive and negative allowable ranges of the target value that you have planned. |
| (2) | The vibration properly converges within the planned duration. |
Refer to "Acquiring, Displaying and Saving Force Control Log" for about the force control log.
Changing the vibration and motion speed
Vibration and motion speed will change along with the change of the virtual damper as shown below.
| Virtual damper | Vibration | Motion speed |
|---|---|---|
| Increase | Decrease | Decelerate |
| Decrease | Increase | Accelerate |
| Virtual damper | Condition |
|---|---|
| 100% |  |
| 50% | 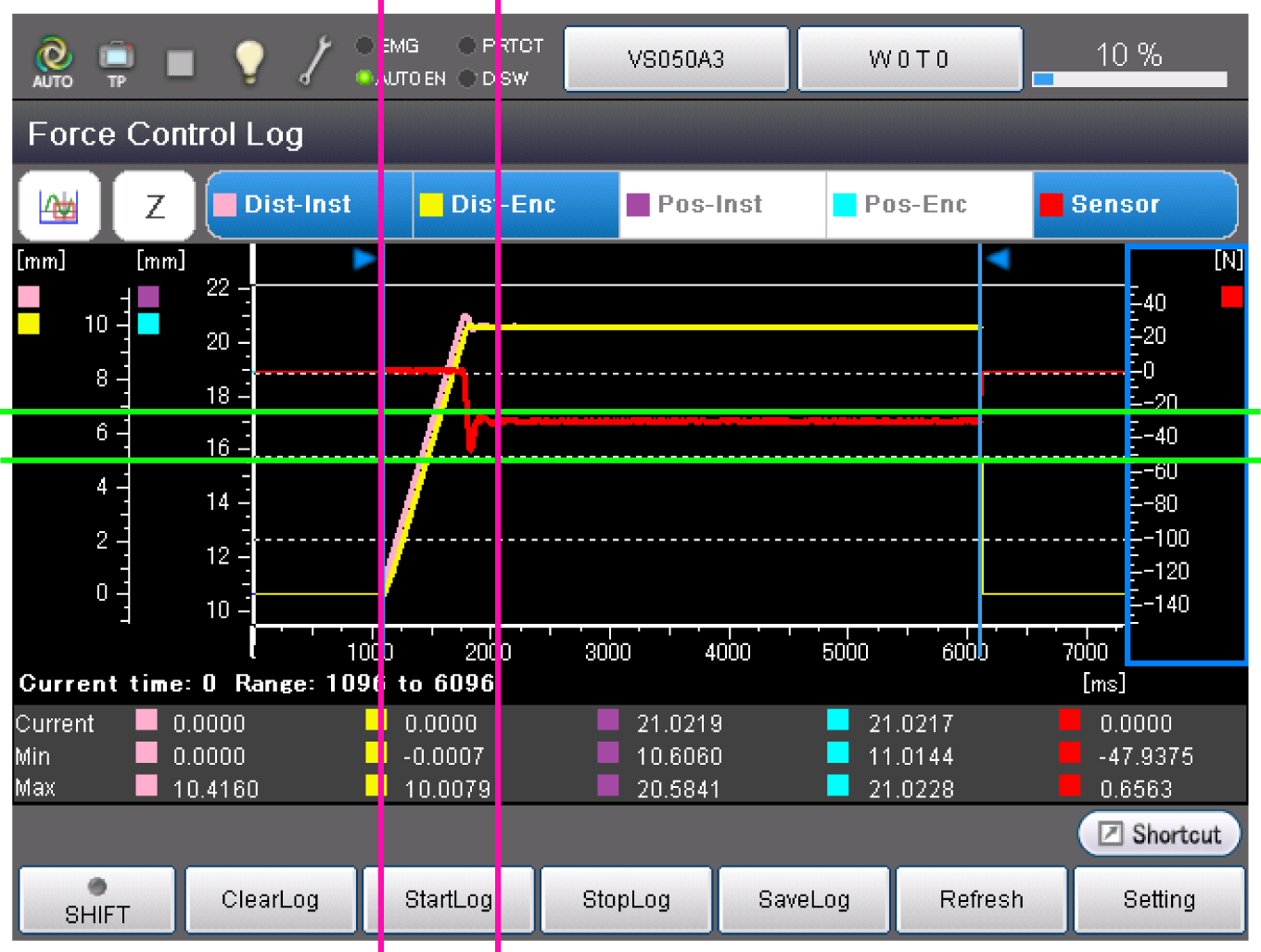 |
| 30% | 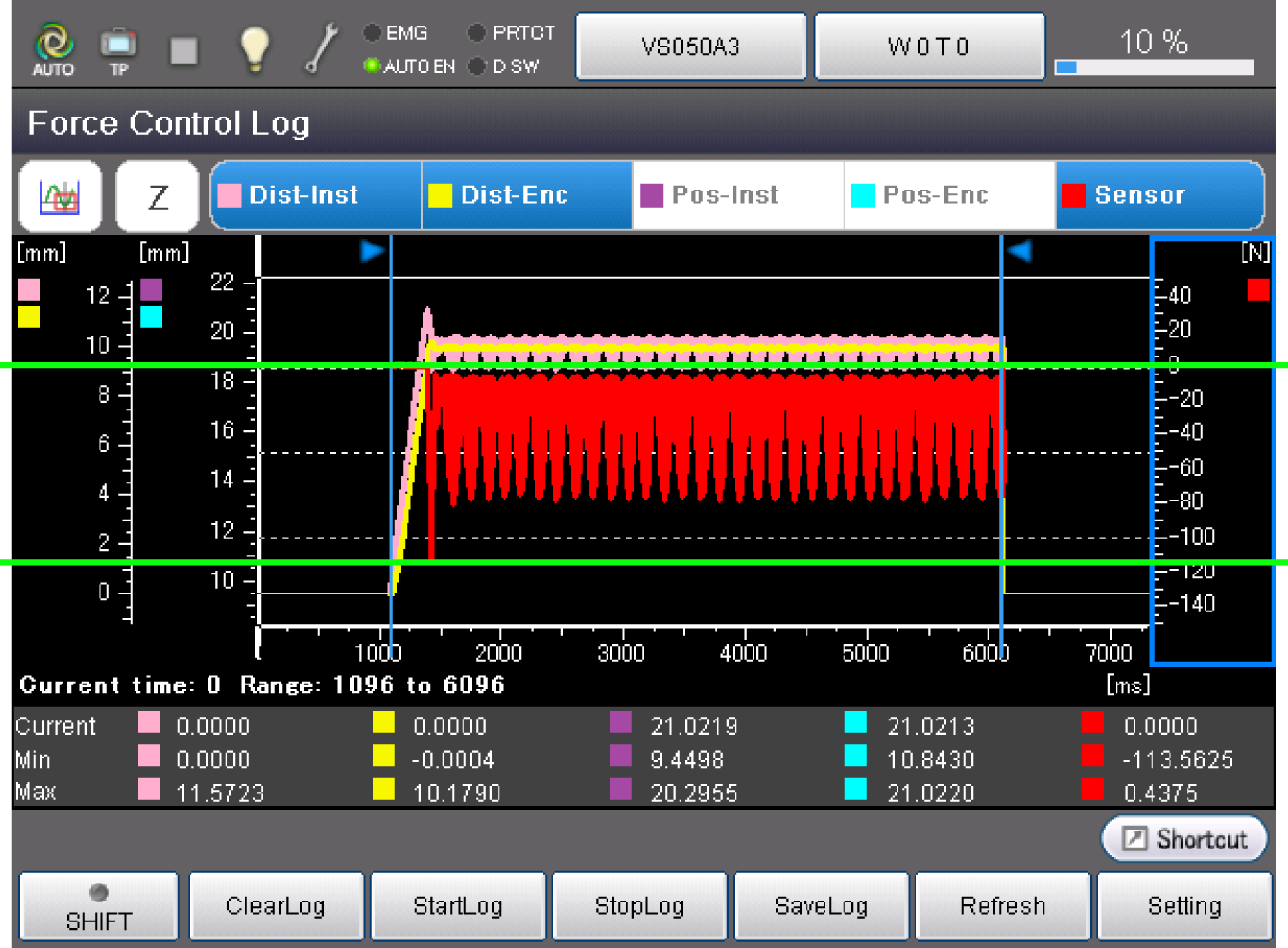 |
Precautions for adjustment
- Basically, adjust the virtual damper only. Leave the values of virtual inertia and virtual spring as they are.
- Note that if you enter a virtual spring value, it will fail to perform a press fitting motion as you have specified by target values.
- If a specified virtual damper causes oscillation, the force control will be impossible. Do not set the value lower than the one that causes oscillation.
ID : 2161