
ID : 1838
Displaying the Current Robot Arm Position
Key
[ARM] ([SHIFT] + [RUN])
Operation
1
Press [ARM] to call up the current robot position window.
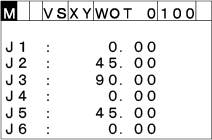
2
When the robot controller is turned on, the coordinates is expressed in joint variables by default as shown above.
Press [OK] to call up the Display Style window where you can select the desired expression.
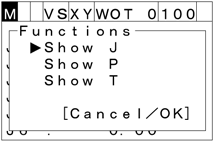
3
Choose the desired expression by using the up and down cursor keys, then press [OK].
To discard the new choice, press [CANCEL].
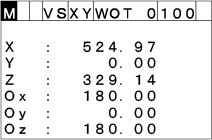
On the current robot position window, the expression of the current robot position can be changed between J type, P type and T type by using the right and left cursor keys.
ID : 1838