
ID : 1839
Displaying Variable Values
Key
[VARIABLE] ([SHIFT] + [STEP BACK])
Operation
1
Press [VARIABLE] to call up the screen which lists variables used in your robot controller.
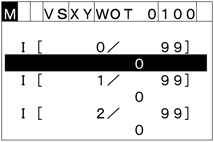
2
When the robot controller is turned on, the integer variables are displayed by default.
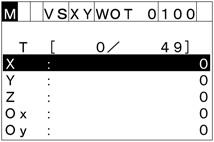
Select the desired variable by cycling through variable types to be displayed with the right and left cursor keys.
(The screen cycles through "I ⇔ F ⇔ D ⇔ V ⇔ P ⇔ J ⇔ T ⇔ I")
3
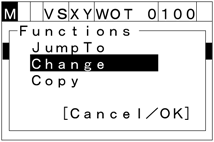
With the desired variable type displayed, press [OK] to call up the "Function" screen to handle the selected variable.
To discard the new setting, press [CANCEL].
NOTE: There are two types of "Function" screens. For I, F, D, and V variables, three items (JumpTo, Change, and Copy) will display; for P, J, and T variables, five items (JumpTo, Move, Change, GetPos, and Copy) will display.
4
To execute a function, choose desired item with the up and down cursor keys, then press [OK]. To discard the new choice, press [CANCEL].
JumpTo
If you choose "JumpTo" with the up and down cursor keys and press [OK], then the following JumpTo screen appears. Enter the variable number you want to jump to, into the highlighted line and press [OK].
To discard the new setting and return to the previous screen, press [CANCEL].

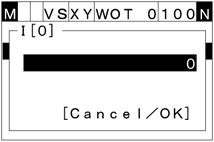
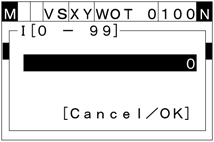
Change
If you choose "Change" with the up and down cursor keys and press [OK], then the following variable setting window appears. Enter the desired value to be assigned to the variable and press [OK].
To discard the new setting and return to the previous screen, press [CANCEL].
Copy
If you choose "Copy" with the up and down cursor keys and press [OK], then the CopyTo window appears. Enter an arbitrary variable number which the value of the variable will be copied to, then press [OK].
To discard the new setting and return to the previous screen, press [CANCEL].
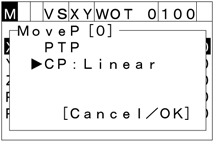
Move
If you choose "Move" with the up and down cursor keys and press [OK], then the PTP/CP selection window appears.
To discard the new choice and return to the previous screen, press [CANCEL].
After selecting the PTP or CP motion, press [OK] while holding down the deadman switch, the robot arm will move to the specified position (in Manual mode or Teach Check mode).
- Restarting the robot arm's movement to the specified position.
To interrupt the robot arm's movement to the specified target position, release [OK]. The screen returns to the target position setting one. Pressing [OK] again restarts the movement to the target position. Pressing [CANCEL] returns the screen to the Position Variable one.
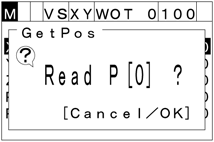
GetPos
If you choose "GetPos" with the up and down cursor keys and press [OK], then the current position reading window appears as shown below.
To discard the new choice and return to the previous screen, press [CANCEL].
Press [OK] to get the current robot position into the specified variable.
ID : 1839