
ID : 2241
Advanced Settings of Monitoring
Operation path : Basic screen - [F2 Arm] - [F6 Aux] - [F2 Collision/Interference]
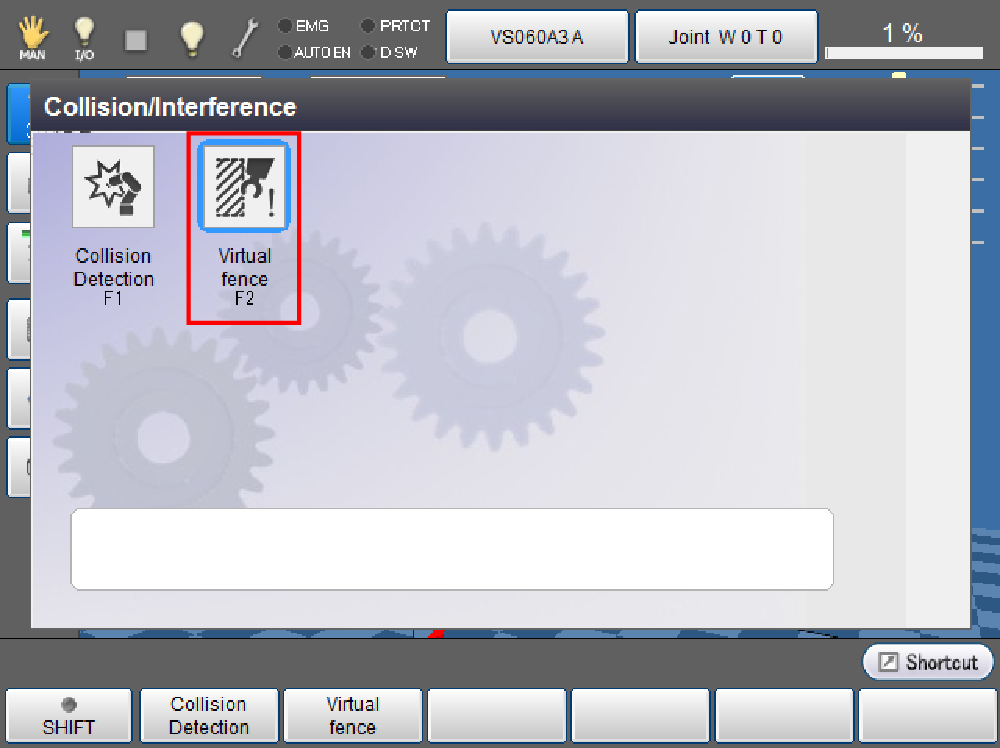
Press [F2 Virtual fence] to open the screen.
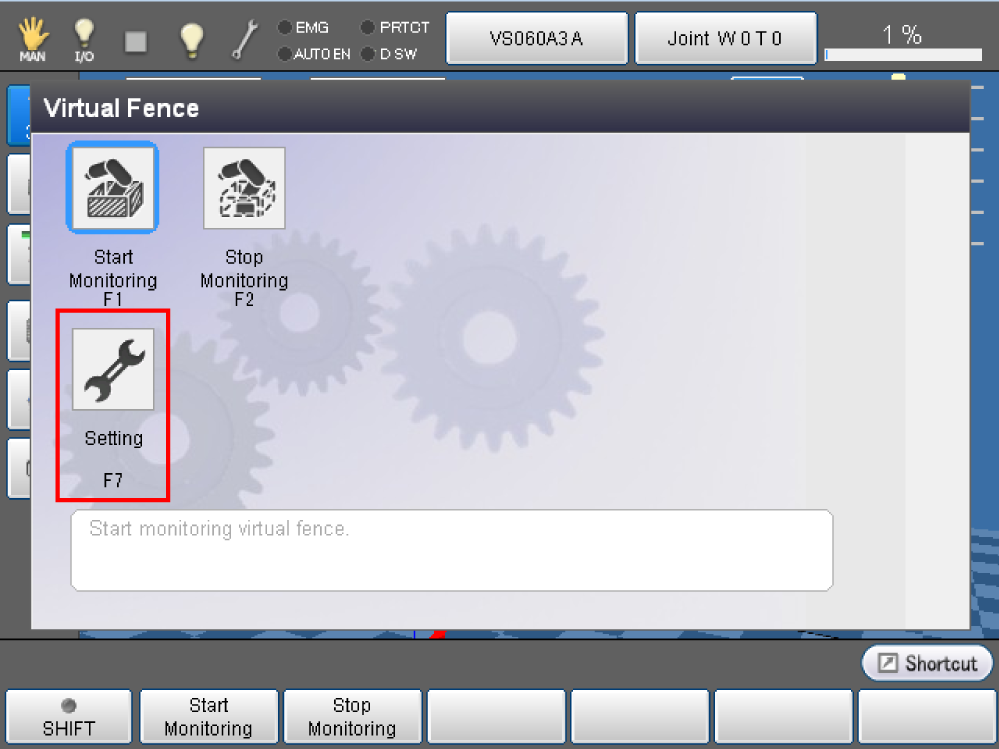
Perform the monitoring setting. Press [F7 Setting]. Once the parameter list appears, enable [366 : Virtual fence setting]. Change the default values of other parameters, if necessary. To change a value, press [F5 Edit]
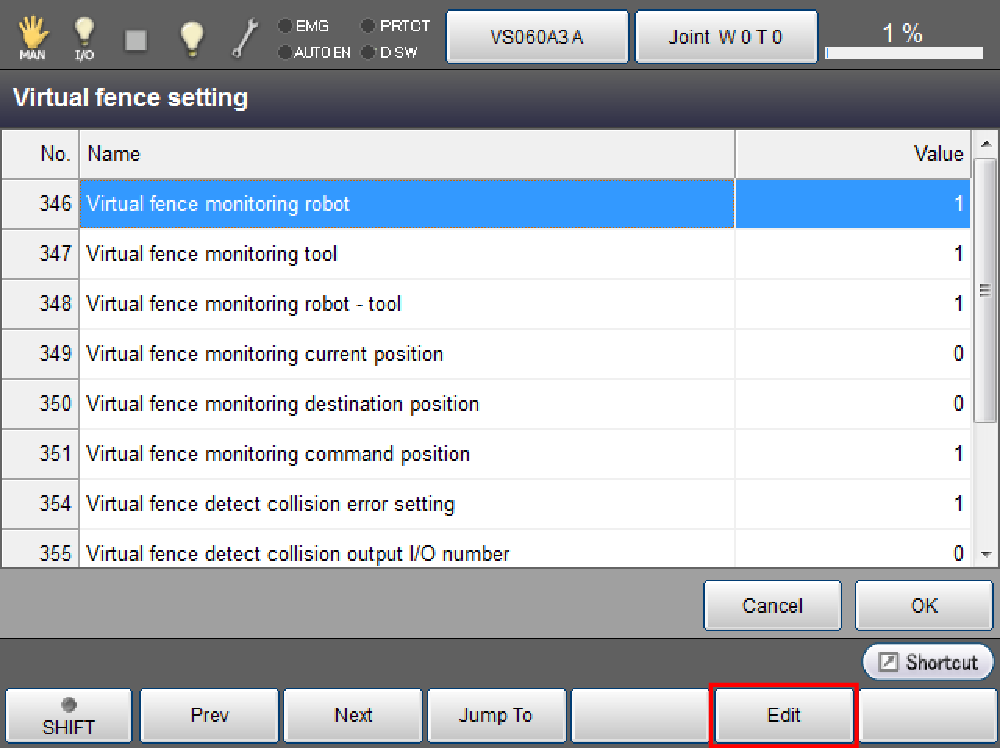
Parameter List
The robot stops when an error occurs. When [354 : Virtual fence detect collision error setting] is not enabled, it does not stop even if collision is detected.
| Number | Item | Unit | Default | Description |
|---|---|---|---|---|
| 346 | Virtual fence monitoring robot | - | 1 | Monitor robot and equipment 0: Disable 1: Enable |
| 347 | Virtual fence monitoring tool | - | 1 | Monitor tool and equipment 0: Disable 1: Enable |
| 348 | Virtual fence monitoring robot - tool | - | 1 | Monitor robot and tool 0: Disable 1: Enable |
| 349 | Virtual fence monitoring current position | - | 0 | Monitor the current value 0: Disable 1: Enable |
| 350 | Virtual fence monitoring destination position | - | 0 | Monitor the target position With set to 1: Enable, decide whether or not the robot collides with the target on its startup. |
| 351 | Virtual fence monitoring command position | - | 1 | Monitor the command position With set to 1: Enable, decide whether or not the robot collides with the target while running. |
| 353 | Virtual fence monitoring cycle | ms | 8 | Set the monitoring cycle. |
| 354 | Virtual fence detect collision error setting | - | 1 | Specify whether to issue an error at the collision detection. 0: Disable 1: Enable |
| 355 | Virtual fence detect collision output I/O number | - | 0 | Specify I/O number to output (available only for the collision detection of the current value). |
| 356 | Virtual fence monitoring robots | - | 1 | Monitor between robots (available only for the cooperative control function is enabled) 0: Disable 1: Enable |
| 366 | Virtual fence setting | - | 0 | Specify the virtual fence setting. 0: Disable The setting becomes effective after reboot. |
| 370 | Virtual fence robots model margin | mm | 100 | Set the size of monitoring model to extend for the safety during the monitoring of robot-to-robot in the cooperative motion. For details, refer to the following "Extend the Size of Robot-to-robot Monitoring Model". This parameter is available only for the cooperative control function. This is available in Ver.2.3.* or higher. |
In the cooperative control function, the monitoring setting of the master robot is applied to the slave robot as well.
(Ver2.2.* or higher)
If the monitoring cycle causes timeout, firstly reduce the number of monitoring models. If there is no effect for that, set the parameter [353: Virtual fence monitoring cycle] longer than 8 ms.
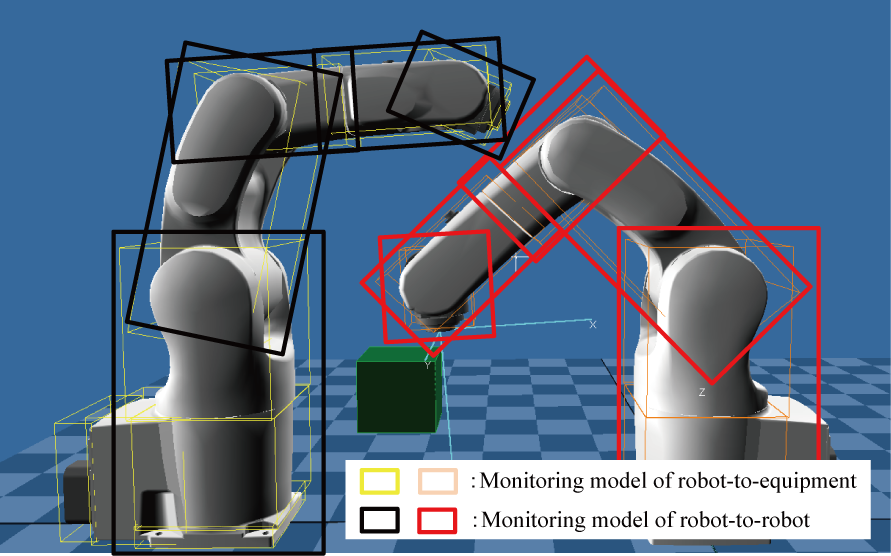
Extend the Size of Robot-to-robot Monitoring Model
When operate several robots with the cooperative control function, at the initial setting, the size of monitoring model is set larger for the safety.
The size of extending can be set with the parameter "370: Virtual fence robots model margin". The motion between small gaps may cause an error at the setting of the default value, but by changing margin appropriately, the operation can be performed safely.
Changing the size of extending should be examined by customer, which is based on the judgment in which no collision occurs between the robots in operation.
ID : 2241