
ID : 2472
SS1 Input
Function
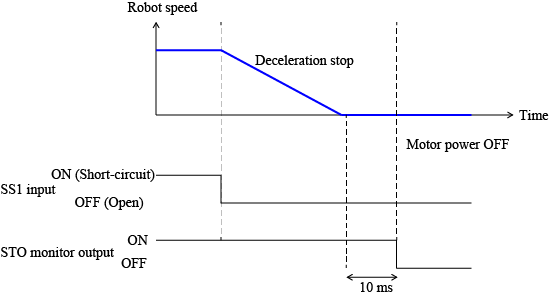
When this input is released (turns off), a robot starts deceleration to stop and then the motor power turns OFF. (Dual line)
This stop mechanism is equivalent to the stop category 1 of IEC 60204-1.
Terminal Number
| Signal name | Terminal number |
|---|---|
| SS1 input (Line 1) | No.14 and 48 of Motion I/O input |
| SS1 input (Line 2) | No.30 and 64 of Motion I/O input |
Input Condition and Operation
- Release of this input starts SS1 function.
Motor power turns off regardless of the operation mode (Manual, Auto, Teach-check).
When the program is running (when Robot Running output is ON), the robot starts deceleration to stop and then the motor power turns off.
When the program is stop-state under the Manual or Auto mode, it just turns off the motor power and no other change occurs. - This input should be ON (short-circuit) when you turn on the motor power to run a robot in manually or automatically.
- If the time difference between two SS1 inputs is 0.5 second or more, it is deemed as an abnormal state. An error is issued and the motor power will turn off.
- Use different contacts to control two SS1 inputs. If one SS1 circuit is always short-circuited, or if two SS1 circuits are joined in one circuit, it is deemed as an external circuit error, as a result, the robot cannot start operation.
Input Timing
This input is prior to any other commands or input signals.
Timing Chart
Attention
In the messages displayed on a teach pendant regarding the SS1 function, the word "ON" means that the SS1 function is enabled. This also means that the circuits for SS1 input signals are open.
ID : 2472