
ID : 2473
SS2 Input
Function
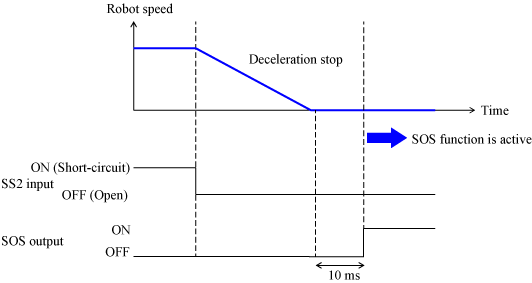
When this input is released (turns off) under the Auto mode, a robot starts deceleration to stop. The motor power remains ON after the stop. This input is dual-lined and controlled by the external device being connected.
Once the external device releases (turns off) this input, SS2 function is activated.
This stop mechanism is equivalent to the stop category 2 of IEC 60204-1.
Terminal Number
| Signal name | Terminal number |
|---|---|
SS2 input (Line 1) |
No.1 and 35 of Motion I/O Input |
| SS2 input (Line 2) | No.17 and 51 of Motion I/O Input |
Input Condition and Operation
Release of this input under the Auto mode starts SS2 function.
If this input is released while program running (Robot running output is "ON"), the robot starts deceleration to stop. Motor power remains ON and SOS function starts after the stop. The controller monitors the encoder value to check if the robot moves from the stop position.
SS2 input is effective to Auto mode operation only. There is no effect on Manual or Teach-check mode.
- If the time difference between two SS2 inputs is 0.5 second or more, it is deemed as an abnormal state. An error is issued and the motor power will turn off.
- Use different contacts to control two SS2 inputs. If one SS2 circuit is always short-circuited, or if two SS2 circuits are joined in one circuit, it is deemed as an external circuit error, as a result, the robot cannot start operation.
Timing Chart
ID : 2473