
ID : 2602
RSM Output
Function
This signal outputs the status of controller's RSM function. (Dual lines)
Terminal Number
| Signal name | Terminal number |
|---|---|
| RSM1 output (Line 1) | No.3 and 37 of Motion I/O output |
| RSM1 output (Line 2) | No.17 and 51 of Motion I/O output |
| RSM2 output (Line 1) | No.5 and 39 of Motion I/O output |
| RSM2 output (Line 2) | No.19 and 53 of Motion I/O output |
| RSM3 output (Line 1) | No.7 and 41 of Motion I/O output |
| RSM3 output (Line 2) | No.21 and 55 of Motion I/O output |
How to Use
Use this signal to check the status of RSM function.
For details, refer to Safety Circuit (Safety Motion).
ON Condition
This signal turns ON when RSM function is enabled while the moter power is ON.
- Auto mode
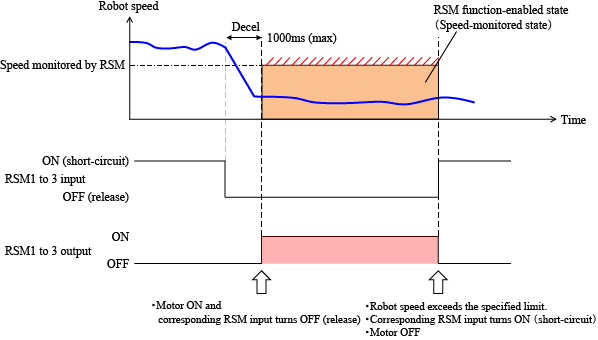
・RSM1 output turns ON when RSM1 input turns OFF (released).
・RSM2 output turns ON when RSM2 input turns OFF (released).
・RSM3 output turns ON when RSM3 input turns OFF (released). - Manual mode
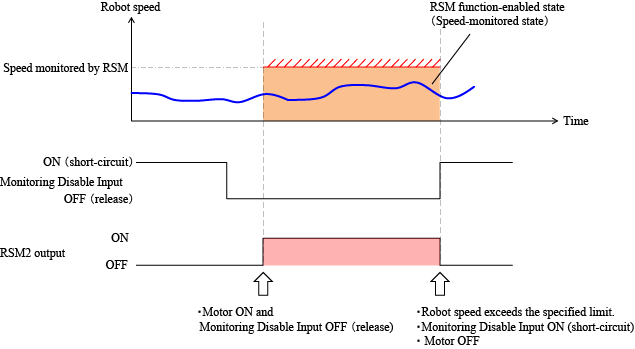
Since the robot motion speed is limited to and monitored with 250 mm/s, only RSM2 output turns ON regardless of the input signal used (RSM1, RSM2, RSM3).
OFF Condition
- Auto mode
・RSM1, RSM2, and RSM3 outputs turn OFF when the robot speed exceeds the specified limit.
・When an RSM1 to 3 input turns ON (short-circuit), the corresponding RSM output (RSM1 to 3 output) turns OFF.
・RSM1, RSM2, and RSM3 outputs turn OFF at the robot motor-OFF operation. - Manual mode
・RSM2 output turns OFF when the robot speed exceeds 250 mm/s.
・RSM2 output turns OFF when Monitoring Disable input turns ON (short-circuit).
・RSM2 output turns OFF at the robot motor-OFF operation.
Timing Chart
Auto Mode
Manual Mode
ID : 2602