
ID : 5356
TrackMove
Function
With the catch-up motion, move a robot arm to the tracking target work.
This command is available in Ver.1.6.* or higher.
Syntax
TrackMove Motion interpolation,Target position[, Motion option]
Guaranteed Entry
- Motion interpolation
- Designate a motion interpolation method: "P"/"PTP" for PTP interpolation motion, or "L" for CP interpolation motion.
- Target position
- Specify position type data that stands for a tracking target work obtained by "TrackTargetPos".
For a reference position, it is possible to specify position type data that is offset in specified position/attitude from position type data obtained by "TrackTargetPos". - Motion option
- A motion option can be specified.
Description
With the catch-up motion, move a robot arm to the tracking target work.
To execute this command, the task must acquire robot axis control.
If you enter the position type data obtained by "TrackTargetPos" in the second argument "Target position" as-is, the robot attitude will be the Default posture of holding the work.
However, this is different in the circular tracking operation.
In the circular tracking, the posture of the end-effector rotates by the rotation angle between the Upstream limit of the tracking range to the position where a robot catches up a workpiece.
The posture to be rotated is different depending on the posture in the position which is specified in the second argument "Target position".
If the position type acquired by "TrackTargetPos" is entered in the second argument "Target position" without any change, the posture of Calibration point on upstream limit will be the posture to be rotated.
If you specify the value that is the sum of position type data acquired by "TrackTargetPos" and the correction values described in "To correct robot attitude” in the second argument "Target position", the posture to be rotated is the posture that is the correction value is added to the posture of Calibration point on upstream limit.
Also, in the circular tracking, the robot posture can be kept as the posture in the position where the second argument "Target position" specifies.
In this case, change the control method of the tool-end with TrackStart command. For details, refer to the guaranteed entry of TrackStart command, "Option setting".
For details about the tool-end posture, refer to "Types of tool-end posture control".
To correct the robot attitude depending on the workpiece direction detected by the vision sensor, as the following sample code shows, obtain the workpiece's attitude angle detected by the vision sensor by TrackBufferRead first, and then add correction values for each attitude element (Rx, Ry, and Rz) of the second argument [Target position].
[Lower than Ver.2.0.*]
Retrieve workpiece data from the buffer, and set it as a tracking-target workpiece
P[10] = TrackTargetPos(1, -1, -1, 1)Retrieve the index number of tracking-target workpiece
vIndex = TrackBufferIndexes(1, 1)Add attitude and angle of workpiece to the attitude element
LetRZ P10 = PosRZ(P10) + TrackBufferRead(1, vIndex(0), 10)Delete the tracking-target workpiece data from the buffer
TrackTargetRelease 1[Ver.2.0.* or higher]
Retrieve workpiece data from the buffer, and set it as a tracking-target workpiece
P[10] = TrackTargetPos(1)Add attitude and angle of workpiece to the attitude element
LetRZ P10 = PosRZ(P10) + TrackBufferRead(1, -1, 10)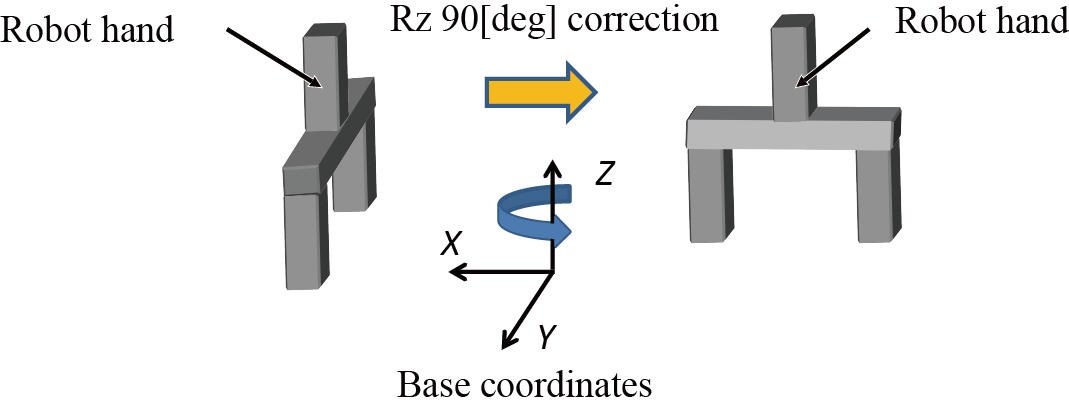
Related Terms
Move, TrackApproach, TrackBufferRead, TrackDepart, TrackDraw, TrackStart, TrackStop, TrackTargetOffset, TrackTargetPos, TrackShiftTarget, Commands for Conveyor Tracking, Commands for Circular Tracking
Attention
- This command is dedicated for conveyor and circular tracking.
- This command is available only when it is written between TrackStart and TrackStop.
-
Note that the external speed limit and internal speed limit only affect Move motion that is the robot task motion.
These limits do not affect the catch-up motion. - Unlike Move motion, this command does not move a robot arm to the static target position specified by arguments.
- Please note that the motion target position of the robot will differ depending on the positions where the tool definition and work definition are inserted.
1. If the definition change is written before the "TrackTargetPos".
ChangeTool 1
ChangeWork 1
P[10] = TrackTargetPos(1,-1,1)
TrackMove P, P[10]The motion target position of the robot is not affected by the changes of tool definition and work definition.
2. If the definition change is written after the "TrackTargetPos".
P[10] = TrackTargetPos(1,-1,1)
ChangeTool 1
ChangeWork 1
TrackMove P, P[10]The motion target position of the robot is affected by the changes of the tool definition and work definition.
Since the tool and work definitions at the TrackTargetPos execution and at the TrackApproach execution, the robot motion target position will deviate by these differences.
Example
-ID : 5356