
ID : 5377
TrackStart
Syntax
TrackStart Conveyor number [, Option setting ]
Guaranteed Entry
- Conveyor number
-
Specify the conveyor number (1-16) to be used by integer type data.
(If your robot controller is Ver.1.11.* or lower, available conveyor number is 1 or 2.) - Option setting
-
Specify the setting value for the options of the robot behavior in the tracking mode by integer type data. This is omittable. This should be "-1" if it is omitted. This entry is available in Ver.1.8.* or higher.
Option setting consists of three items, more than one items can be enabled at the same time. The combination of the setting values is as below. - *1 : In extended-joint tracking operation, Conveyor speed is always enabled.
-
*2 : An option for the tool-end posture control used in the circular tracking. For detail, refer to "Types of tool-end posture control".
This option is available in the robot controller software version 2.8.0 or higher. If the robot controller software version is lower than 2.8.0, the robot moves the same as when the tool-end posture control is set to "Disabled".
When either the conveyor tracking or extended-joint tracking is used, regardless of the tool-end posture control setting state(Enabled/Disabled), the tool-end is kept in a given posture.
| Setting value | Conveyor speed | Error setting | Tool-end posture control |
|---|---|---|---|
| -1 | - | - | - |
| 0 | |||
| 1 | Enabled | - | - |
| 2 | - | Enabled | - |
| 3 | Enabled | Enabled | - |
| 4 | - | - | Enabled |
| 5 | Enabled | - | Enabled |
| 6 | - | Enabled | Enabled |
| 7 | Enabled | Enabled | Enabled |
Setting value 4 to 7 are available in the robot controller software version 2.8.0 or higher.
The table below shows the functions of each option.
| Option | Setting | Description |
|---|---|---|
| Conveyor speed (*1) | Enabled | A robot adjusts its speed along with the speed change of the conveyor after the tracking motion starts. |
| Disabled | A robot keeps the conveyor speed at the tracking motion start, and does not adjust the speed according to the conveyor's speed change after the tracking motion start. | |
| Error setting | Enabled | An error is not issued when a workpiece passes the downstream limit of the tracking range. |
| Disabled | An error is issued when a workpiece passes the downstream limit of the tracking range. | |
| Tool-end posture control (*2) | Enabled | Regardless of the rotation angle of turntable, a robot moves with keeping a given tool-end posture. |
| Disabled | A robot moves with turning the tool-end posture along with the turntable rotation. |
Description
Start the tracking mode.
Robots do not move just because this command is executed.
Specify the robot motion by using the tracking motion commands below.
- TrackMove
- TrackApproach
- TrackDepart
- TrackDraw
- TrackAbsMove
- TrackAbsApproach
Related Terms
TrackAbsApproach, TrackAbsMove, TrackApproach, TrackDepart, TrackDraw, TrackMove, TrackStop, TrackTargetPos, TrackTargetRelease, Equipment Protection by Area Function, Commands for Conveyor Tracking, Commands for Circular Tracking
Attention
- This command is dedicated for conveyor and circular tracking.
- During the tracking mode, executing Step-start or Teach check mode will result in an error.
- In the END command execution, option settings you have made remain enabled.
- If a power supply turns OFF, option settings you have made remain disabled.
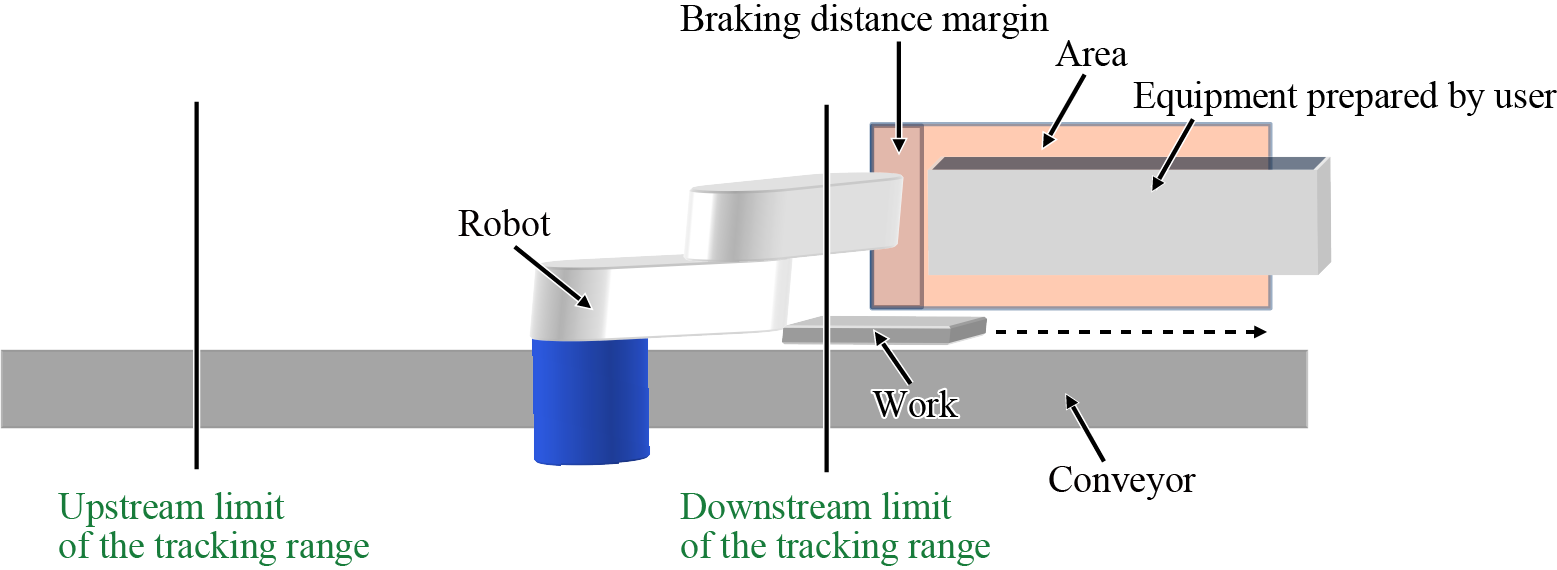
- If option2 setting is enabled, a robot moves across the Downstream limit of the tracking range. Please pay attention to avoid collisions with equipments placed behind the Downstream limit of the tracking range. It is recommended to perform collision check by using Area function to prevent unintended contact between robot and equipments.
- The combination use of the exclusive control and conveyor tracking is available in version 2.8.* or higher.
However, this command is not available during the deceleration caused by the exclusive control. - This command is not available during the deceleration caused by SS2 or RSM.
Example
- Tracking mode starts with the Option settings (Conveyor speed and the Error setting) disabled.
TrackStart 1- Tracking mode starts with the Option settings (Conveyor speed and the Error setting) enabled.
TrackStart 1, 3ID : 5377