
ID : 3135
TrackAbsMove S
Function
With the catch-up motion, perform a robot task motion of free curve interpolation where a robot passes through designated path points.
This command is available in Ver.2.5.* or higher.
Syntax
TrackAbsMove S [, Pass start displacement],Path number[, Motion option]
Guaranteed Entry
- Pass start displacement
- Pass start displacement can be specified.
- Path number
- Designate a path number by integer type data.
- Motion option
- A motion option can be specified.
Description
With the catch-up motion, perform a robot task motion of free curve interpolation where a robot passes through a designated path number. The trajectory becomes a smooth path. TCP points passes through a curve with constant speed, except for the acceleration or deceleration motion.
To execute this command, the task must acquire the axis control of robot.
Related Terms
Move S, TrackAbsMove, TrackAbsApproach, TrackDepart, TrackStart, TrackStop, Commands for Conveyor Tracking
Attention
- This command is dedicated for conveyor tracking.
- This command is available only when it is written between TrackStart and TrackStop.
-
Note that the external speed limit and internal speed limit only affect Move S motion that is the robot task motion.
These limits do not affect the catch-up motion. -
If a path point on the specified path number does not exist, an error occurs.
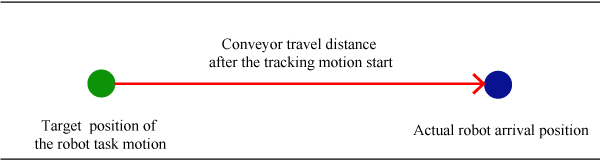
- The actual robot arrival position will be the position where the target position of the robot task motion is offset by the conveyor travel distance from the start and end of the tracking motion. This offset will be reset by executing TrackStop.
Example
TakeArm Keep = 0
Do
Move P, P0 'Move to the waiting position.
Wait IO[10] = On 'Wait until the operation target workpiece passes through the motion start position.
TrackStart 1, 1 'Start the tracking mode.
TrackAbsApproach P, P10, 30 'Execute the tracking motion to pursue the above of P10 position.
TrackAbsMove L, P10 'Execute the tracking motion to execute a robot task motion for P10 position.
TrackAbsMove S, 10 'Execute the tracking motion to perform free-curve interpolation motion for path number 10.
TrackDepart L, 30 'Execute the tracking motion to execute a robot task motion to leave the designated position.
TrackStop 'End of tracking mode.
Loop Until IO[128] = On
ID : 3135