
ID : 4092
How to Display and Set the Base Definition
Set the robot base position viewed from the origin of the world coordinate.
World coordinate system is a coordinate system whose origin is specified by a user. This system enables multiple robots to use a common coordinate system for position designation.
By setting the origin of the facilities to that of the world coordinate system, you can set positions of different robots on the same coordinate system.
To use this function, you need to set the user parameter No.190 "BASE number setting" to 1.
Operation path : [Menu] - [F2 Arm] - [F6 Aux] - [F10 Base]
Base setting window appears.
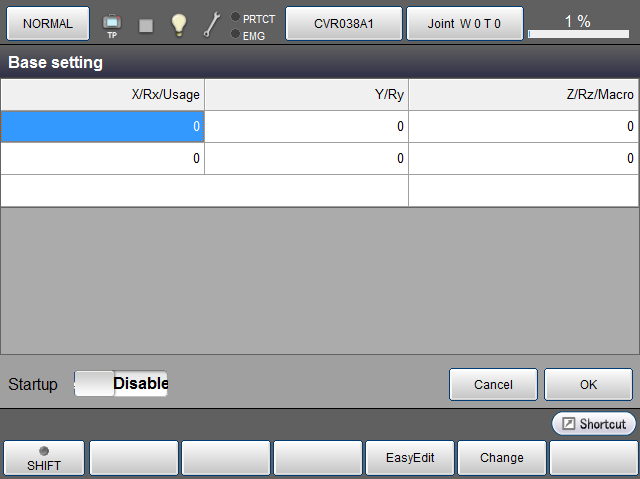
| Available function keys | |
|---|---|
| [F4 Easy Edit] | Set the Base definition by performing three position teaching with a robot. |
| [F5 Change] | Select a coordinate element you want to change, and then press [F5 Change] to display a ten-key. Enter a value with the ten-key, and then press [OK] on the ten-key. To confirm the change, press [OK] on the Base setting window. |
| Start up [Enable/Disable] | Set whether the base setting is enabled/disabled at the startup. The new setting of "Startup = Enable" will not be effective until the controller reboots. |
If you perform the base setting for exclusive control or virtual fence, you need to receive the base definition of COBOTTA with WINCAPSIII, and then you need to perform [Export exclusive control data] and send that definition to the COBOTTA.
To change the base coordinates that have been defined already, use ConvertPosBase command.
For details, refer to Example of ConvertPosBase.
ID : 4092
- Related Information
- Base Definition by using Easy Teaching